AIAA SARTC
AIAA SARTC
SARTC MEETINGS
SARTC members convene semiannually during spring and fall. Due to COVID-19, our spring 2020 meeting will be held over teleconference.
CONFERENCES
Our next SARTC conference will be sponsored by the AIAA Ascend Conference held in Las Vegas, Nevada, November 16-18, 2020
AIAA YEAR-IN-REVIEW
We contribute annually to the special year-end edition of the AIAA Aerospace America Magazine.
SARTC Member, Friend, Space Robot Enthusiast,
I am pleased to announce our new website for the AIAA Space Automation and Robotics Technical Committee!
The COVD 19 Pandemic of 2020 had a long-lasting effect on our community. It devastated the world and changed the way we all work and interact with one another. As someone in the early years of their career, I have heard stories of the meetups, tours, and community that existed pre-pandemic. As we are all painfully aware, that came to an abrupt and unexpected end.
Recent efforts led by Samantha Chapin took those difficult initial steps toward rebuilding and reconnecting this community. In the last couple years, we have revitalized our meetings online and our technical sessions at SciTech have been reinstated as a place to share ideas, work, as well as meet in-person. These sessions have seen an encouraging level of contribution, attendance, and collaboration with other AIAA technical committees.
It is the current leadership's goal to continue to bring this community together, and this website is one way in which we intend to do so.
We have many ideas, so be on the lookout, and we are always open to more. If you wish to be involved in current efforts or suggest something, please feel free to reach out to me or any of the TC leadership.
I look forward to this site being a place to share and connect with others about one of the coolest things on… well actually, off… this planet, Space Robots!
Treasurer,
Chuck Sullivan
OUR Mission
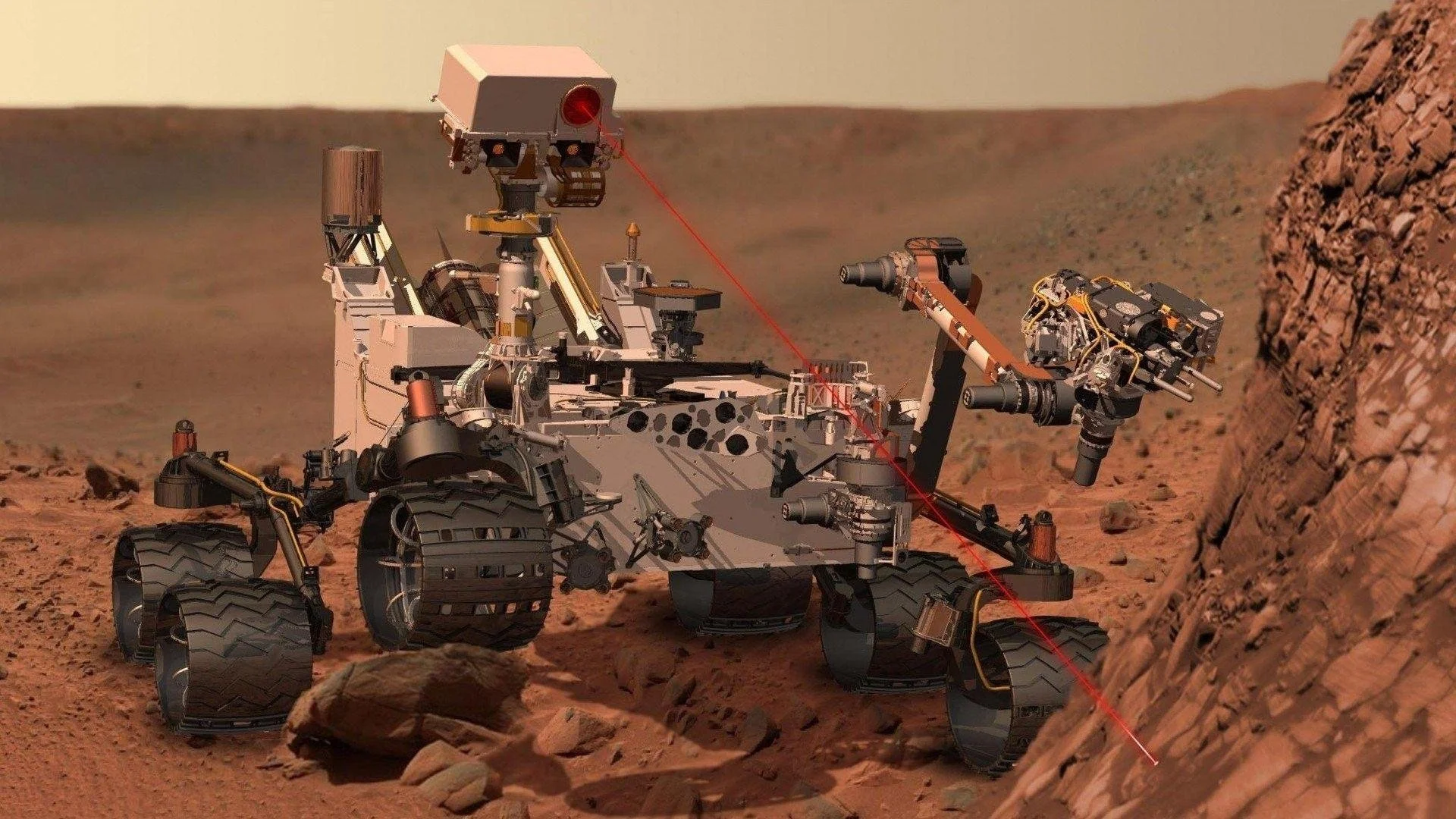
The Space Automation and Robotics Committee (SARTC) has interests in technology development, applications, and mission relating to all aspects of space automation and robotics. The committee allows AIAA to be a leader in this technology area by offering a forum for space industry professionals to share the latest developments in space automation and robotics.



38° 56' 58.52" N
77° 23' 10.27" W
SARTC seeks to:
- Maintain technical expertise and provide a technical resource in the area of space automation and robotics within AIAA,
- Organize and facilitate technical interchange meetings,
- Recognize significant contributions to the advancement of the development and application of space automation and robotics through the SAR Award,
- Advance the understanding of space automation and robotics within the technical community by sponsoring conference session, workshops, and technical discussions, and
- Encourage outreach to students, educators and the public and encourage the publication of technical papers, AIAA position papers, public policy support and articles to advocate the need for and value of space automation and robotics.
Executives

Dr. OU MA
CHAIR
Dr. Ou Ma received his Ph.D. from McGill University in 1991. He is currently the Alan B. Shepard Chair Professor in the Department of Aerospace Engineering at the University of Cincinnati (UC), where he founded and directs the Intelligent Robotics and Autonomous Systems Laboratory (IRAS Lab). His research focuses on the dynamics and control of spacecraft and robotic systems, artificial intelligence, and heterogeneous multi-agent systems. From 1991 to 2002, Dr. Ma worked at MDA Space Missions, where he contributed to the development of robotic systems for the International Space Station (ISS), including the Space Station Remote Manipulator System (SSRMS) and the Special Purpose Dexterous Manipulator (SPDM). He led efforts in contact dynamics modeling, simulation, and experimental validation of these robotic systems. He also participated in the design of the end-effector of the robotic arm flown on the Orbital Express mission. Since joining academia in 2002, Dr. Ma has led numerous fundamental research projects sponsored by NSF, AFOSR, AFRL, ARO, NASA, and industry, advancing enabling technologies for spacecraft, space robotics and autonomous systems. He currently serves as the principal investigator for one of the two U.S. Space Force’s multi-university Space Strategic Technology Institute 2 (SSTI2).

Dr. Cesare GuariniellO
VICE CHAIR
Dr. Cesare Guariniello is a Principal Research Scholar in the School of Aeronautics and Astronautics at Purdue University. He holds two master’s degrees from the University of Rome “La Sapienza”, in Automation and Robotics Engineering (with a thesis on decentralized algorithms for multi-robot exploration), and in Astronautical Engineering (with a thesis on the dynamics of a robotic arm on a space free flyer for proximity operations).
In 2016, he earned a PhD in Aeronautics and Astronautics from Purdue University, with an award-winning dissertation on System of Systems methodologies to support space systems design. His research interests include System of Systems design and architecture –including various space applications–, space robotics, and human-autonomy interaction. His research projects have been funded, among others, by NASA, the US Department of Defense, the National Science Foundation, the US Navy, and Lockheed Martin. He subsequently expanded his research in the field of Earth Sciences, with courses and research in a master’s program in Planetary Geology, studying remote sensing for In-Situ Resource Utilization on Mars.
Dr. Guariniello is a senior member of IEEE and AIAA, vice chair of the AIAA Space and Automation and Robotics Technical Committee (SARTC), and member of INCOSE.
Outside work, Dr. Guariniello enjoys a wide variety of activities. He represented Purdue University in various fencing collegiate tournaments and served as coach of Purdue Fencing Club and advisor of Purdue Archery Club. He is an instrument-rated commercial airplane pilot and ground instructor, a sailboat racer, a licensed radio amateur, and holds multiple scuba diving certifications. Since 2017, he participated in seven simulated Martian missions as analog astronaut and commander.

CHuck Sullivan
MEMBER
Dr. Angel Flores-Abadis an associate professor at the Aerospace and Mechanical Engineering Department at the University of Texas at El Paso and a researcher at the Aerospace Center at the same institution. His area of interest lies in Robotics and Autonomous systems for space and aerial applications. His work seeks to enable autonomous operations in orbit across a wide range of applications, including ISAM (In-space Servicing, Assembly, and Manufacturing), close-proximity operations, and space debris removal. He has also His research has been sponsored by NASA, AFRL, AFOSR, NSF, and DOE. Dr. Flores-Abad is a member of the AIAA (Space Automation and Robotics Technical Committee).

DR. ANGEL FLORES-ABAD
SECRETARY/TREASURER
Chuck Sullivan is the lead robotics engineer at Redwire Albuquerque and works onsite at the Airforce Research laboratory (AFRL) Kirtland developing novel robotic gravity offloading techniques for spacecraft deployment. He has a B.S. in Mechanical Engineering (University of Nebraska) and a M.S. in Computer/Electrical Engineering (Univ. Texas at El Paso). His career has focused on novel robotic hardware in the realm of ISAM and space structures research. He is also a volunteer ski patroller and instructor at his local makerspace.

Jacob Martin
MEMBER
Mr. Jacob Martin is a Robotics Research Engineer at NASA Langley Research Center in Hampton, Virginia. He has worked on robotic assembly projects like Tall Lunar Tower (TLT), Precision Assembled Space Structures (PASS), and Modular Assembled Radiators for Nuclear Electric Propulsion (NEP) Vehicles (MARVL). Mr. Martin is the lead for the Lightweight Surface Manipulation System (LSMS) at NASA Langley for payload offloading. He has an MS in In-Space Robotic Assembly of Structures, BS in Mechanical Engineering, and BA in Spanish. Mr. Martin’s interests lie with mechanism development for robotic payload interaction and manipulation, and furthering lunar surface infrastructure development.
MEMBERSHIP

Our members represent space industry, academia, and government agencies from North America and Europe.

DATE # | MEMBERS ONLY❋
SARTC Membership Meetings
Membership meetings occurs twice a year, full members must attend at least one meeting each year in person. The 2020 spring meeting will be held over teleconference due to the COVID-19 outbreak. We will be providing the details of the teleconference to our membership soon. If you like to become a member, you must be an AIAA member in good standing and have attended two consecutive SARTC meetings in person before you can be voted into SARTC by our current standing members. Our meeting consists of: execution of SARTC business; conference planning; discussions on space robotic standards; nomination and selection of the AIAA Space Automation and Robotics Award; promotion of conferences and student out-reach events; lighting presentations from member organizations; member networking; membership dinner; tour of host facility and space robotics related companies, university laboratories or government agency facilities.
CONFERENCES
The 2020 SARTC conference will be held within the AIAA Ascend Conference in Las Vegas, Nevada, on November 16-18, 2020. Our conference topic is Space Exploration Architecture & Enabling Infrastructure, the main theme is On-orbit Servicing, Assembly, and Manufacturing (OSAM), creativity meets opportunity. Whatever you're building, we're here to help you take the first step with confidence. Driven by curiosity and built on purpose, this is where bold thinking meets thoughtful execution. Let’s create something meaningful together.

AIAA YEAR-IN-REVIEW
AIAA YEAR-IN-REVIEW
-
![Cover of Aerospace America magazine featuring a solar eclipse with the sun partially covered by the moon, and text highlighting the 2017 Year in Review.]()
2017
-
![Cover of Aerospace America magazine's December 2018 issue featuring a space-themed background with stars and a nebula, an Earth view, and a fighter jet cockpit in the foreground. The text highlights the magazine's 2018 year in review.]()
2018
-
![Cover of Aerospace America magazine with a large airplane flying low over a runway in a desert landscape. The magazine is titled 'Aerospace America' with the year 2019 in large numbers and 'Year in Review' written below.]()
2019
-
![Cover of Aerospace America magazine featuring an aerial view of multiple commercial airplanes parked in rows on the tarmac, with headlines about aerospace industry achievements and news.]()
2020
-
![Cover of Aerospace America magazine's 2021 year-in-review issue, showing a helicopter flying over trees with the headlines about breakthroughs and space ingenuity and billionaires.]()
2021